

nā huahana






ZW568 Robot Kōkua Hele
Hoʻolauna Huahana
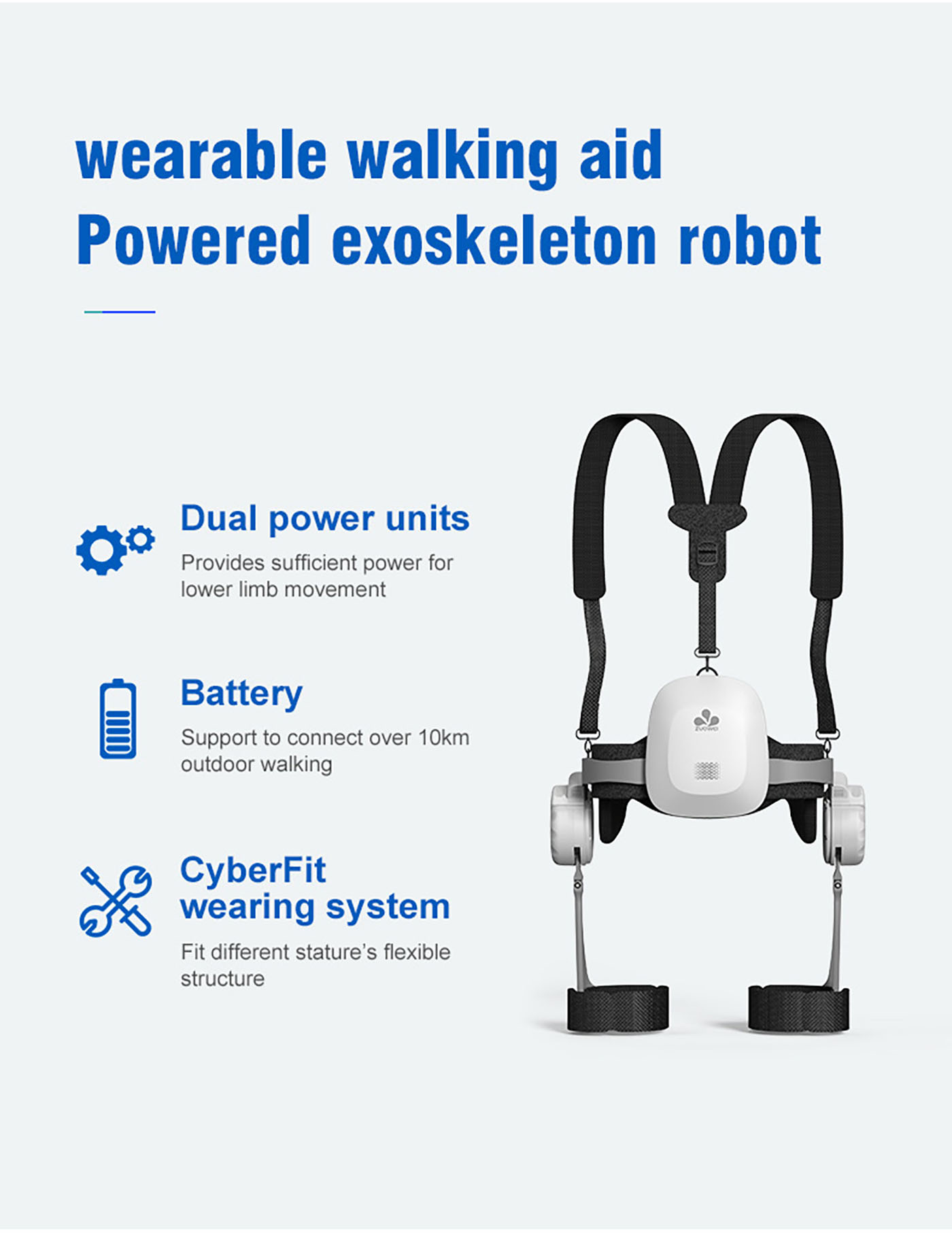
ʻO ka lopako kōkua hele wāwae akamai ZW568 he lopako hiki ke komo ʻia me ke ʻano kiʻekiʻe. Hāʻawi nā ʻāpana mana ʻelua ma ka hui ʻūhā i ka mana kōkua no ka hoʻolōʻihi ʻana a me ke kulou ʻana o ka ʻūhā. E kōkua kēia lopako i nā mea hoʻohana e hele maʻalahi, mālama i ka ikehu a hoʻomaikaʻi i ke ʻano o ko lākou ola. Loaʻa iā ia kahi ʻāpana mana bilateral liʻiliʻi akā ikaika e hāʻawi ana i ka mana lawa e neʻe ai nā lālā haʻahaʻa no 3 mau hola o ka hoʻohana mau ʻana ma ka nui. Hiki iā ia ke kōkua i nā mea hoʻohana e hele maʻalahi i nā mamao lōʻihi, a kōkua i ka poʻe me nā hemahema hele wāwae e hoʻihoʻi i ko lākou hiki ke hele wāwae, a kōkua pū iā lākou e piʻi a iho i nā alapiʻi me ka ikaika kino ʻole.


Nā palena
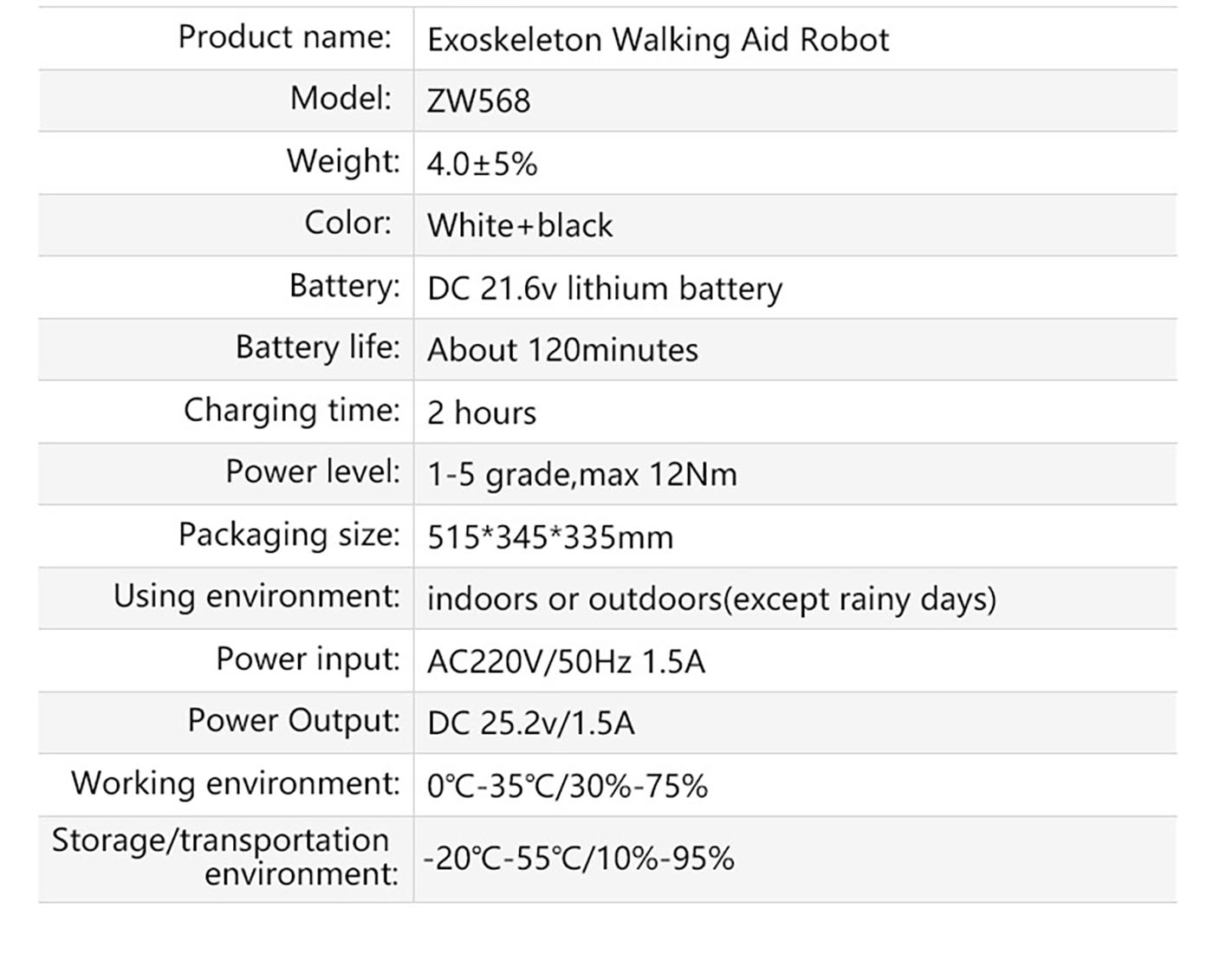
| Uila Pili | 220 V 50Hz |
| Pākahiko | DC 21.6 V |
| Ka manawa hoʻomanawanui | 120 minuke |
| Ka manawa hoʻouka | 4 hola |
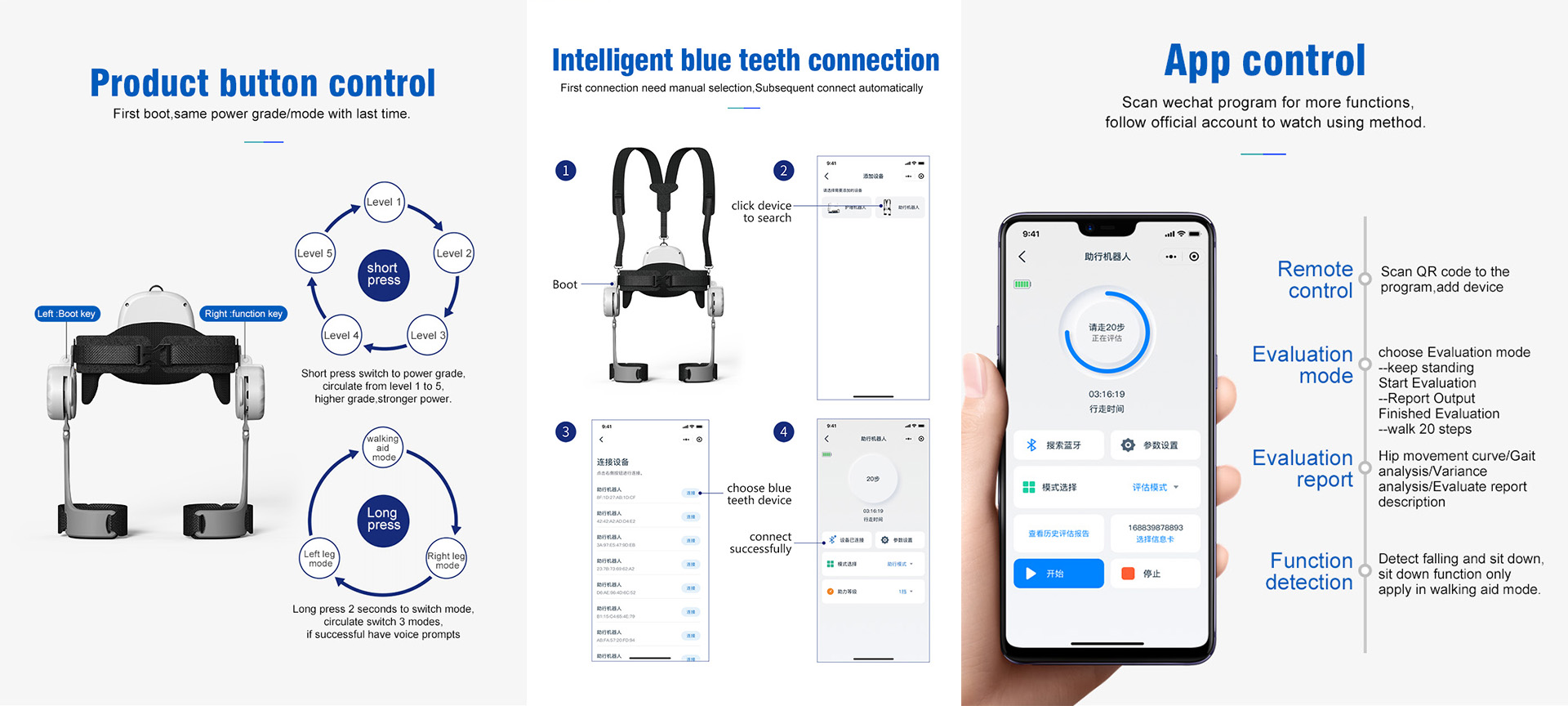
| Pae mana | Papa 1-5 |
| Ana | 515 x 345 x 335 mm |
| Nā wahi hana | i loko a i waho paha koe wale nō ka lā ua |
Nā ʻahaʻaina

● Kōkua i nā mea hoʻohana i ka hoʻomaʻamaʻa hoʻoponopono hou ʻana i kēlā me kēia lā ma o nā hoʻomaʻamaʻa hele wāwae e hoʻomaikaʻi ai i ka hana o ke kino.
●No ka poʻe hiki ke kū hoʻokahi a makemake e hoʻonui i ko lākou hiki ke hele wāwae a me ka wikiwiki no ka hoʻohana ʻana i kēlā me kēia lā.
●Kōkua i nā poʻe me ka ikaika ʻole o nā hui ʻūhā e hele a hoʻomaikaʻi i ke olakino a me ke ʻano o ke ola.
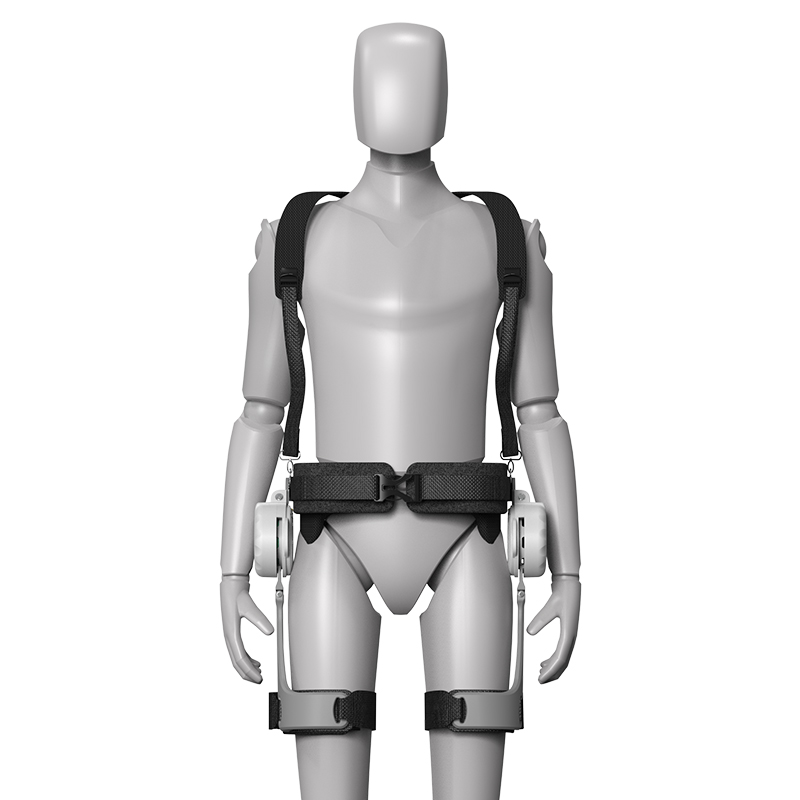
Nā Hale Hana
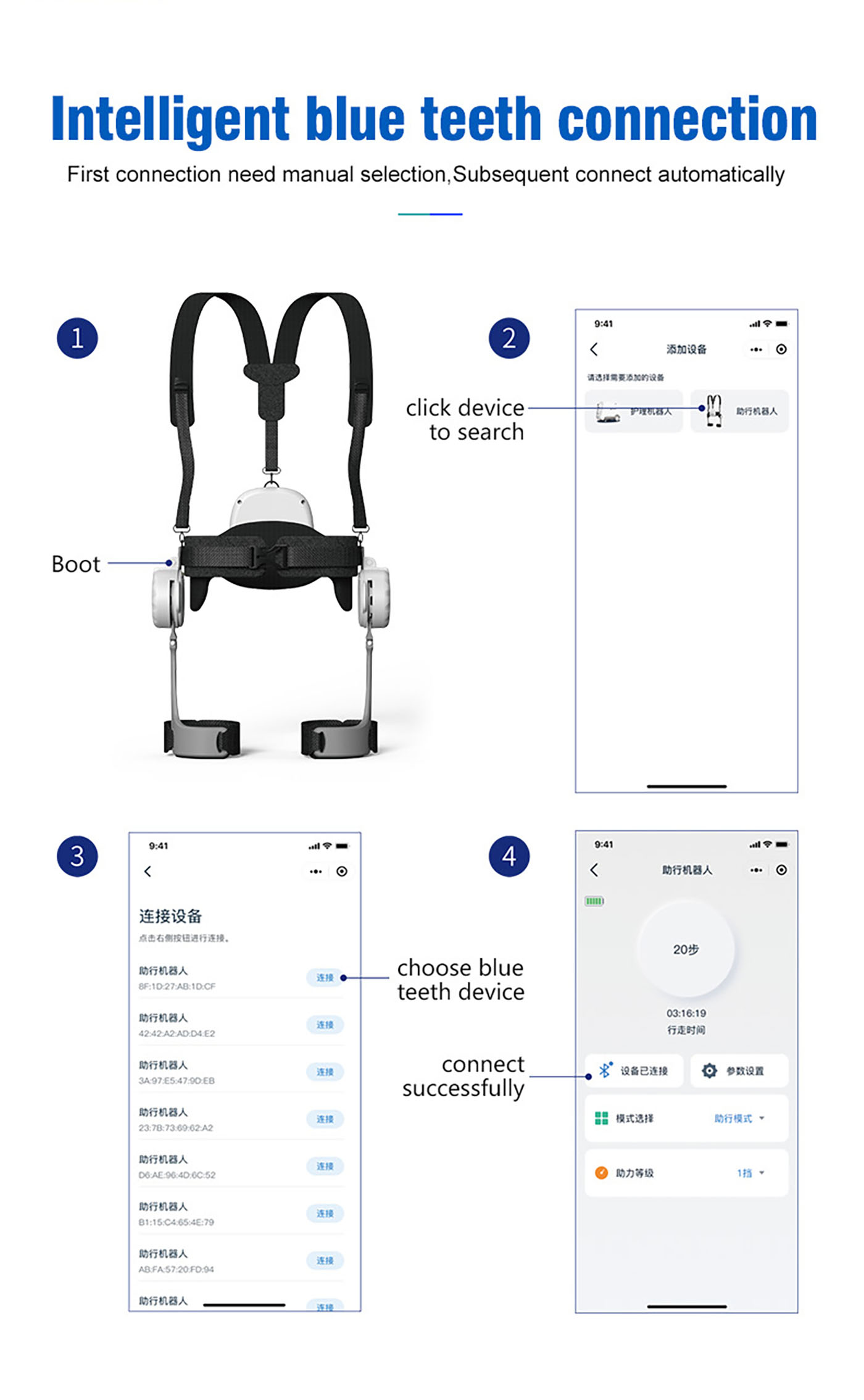
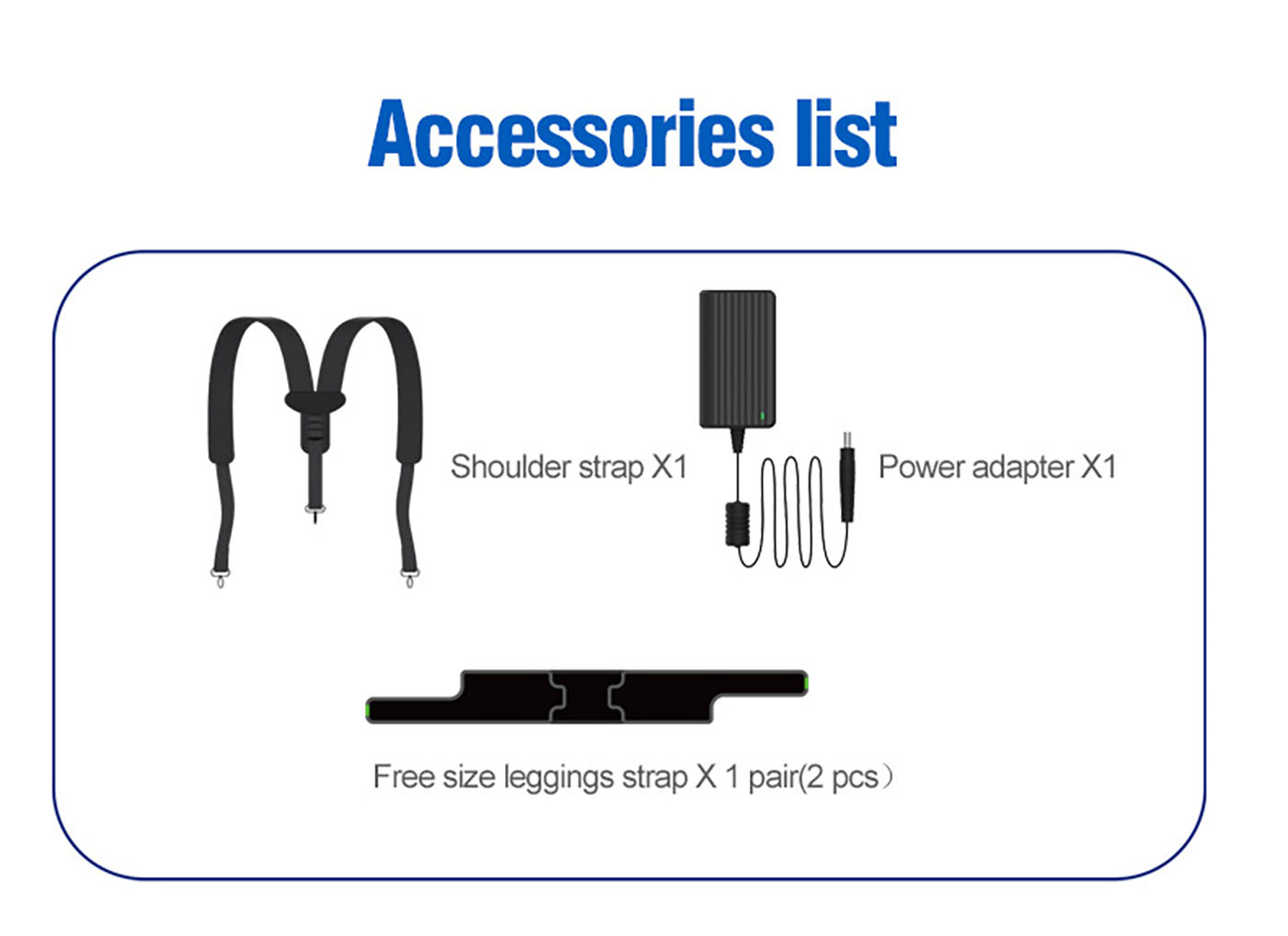
Hana ʻia ka huahana me ke pihi mana, ka ʻāpana mana wāwae ʻākau, ke kāʻei kāʻei, ke kī hana, ka ʻāpana mana wāwae hema, ke kaula poʻohiwi, ka ʻeke peʻa, ka pale pūhaka, ka papa legging, nā kaula ʻūhā.

Nā kikoʻī


Noi
Pili i:
ʻO ka poʻe me ka hemahema o ka ikaika o ka ʻūhā, ka poʻe me ka ikaika o nā wāwae nāwaliwali, nā maʻi o Parkinson, ka hoʻoponopono hou ʻana ma hope o ke ʻoki ʻana



Nā manaʻo hou aʻe
Hoʻolohe:
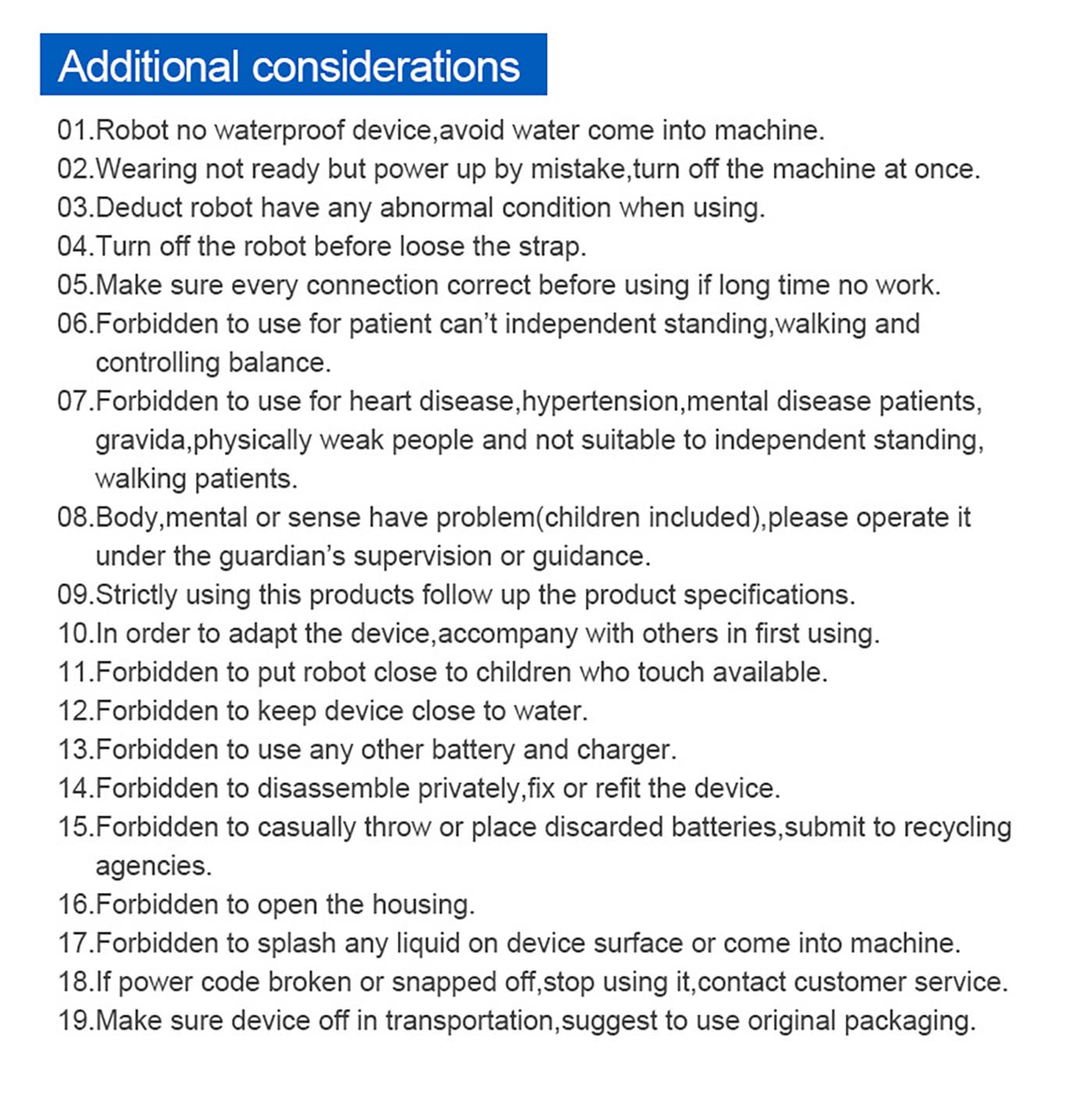
1. ʻAʻole pale wai ka lopako. Mai pīpī i kekahi wai ma luna o ka ʻili o ka hāmeʻa a i loko paha o ka hāmeʻa.
2. Inā hoʻā hewa ʻia ka hāmeʻa me ka ʻaʻahu ʻole ʻia, e ʻoluʻolu e pio koke.
3. Inā loaʻa kekahi mau hewa, e ʻoluʻolu e hoʻoponopono koke i ka hewa.
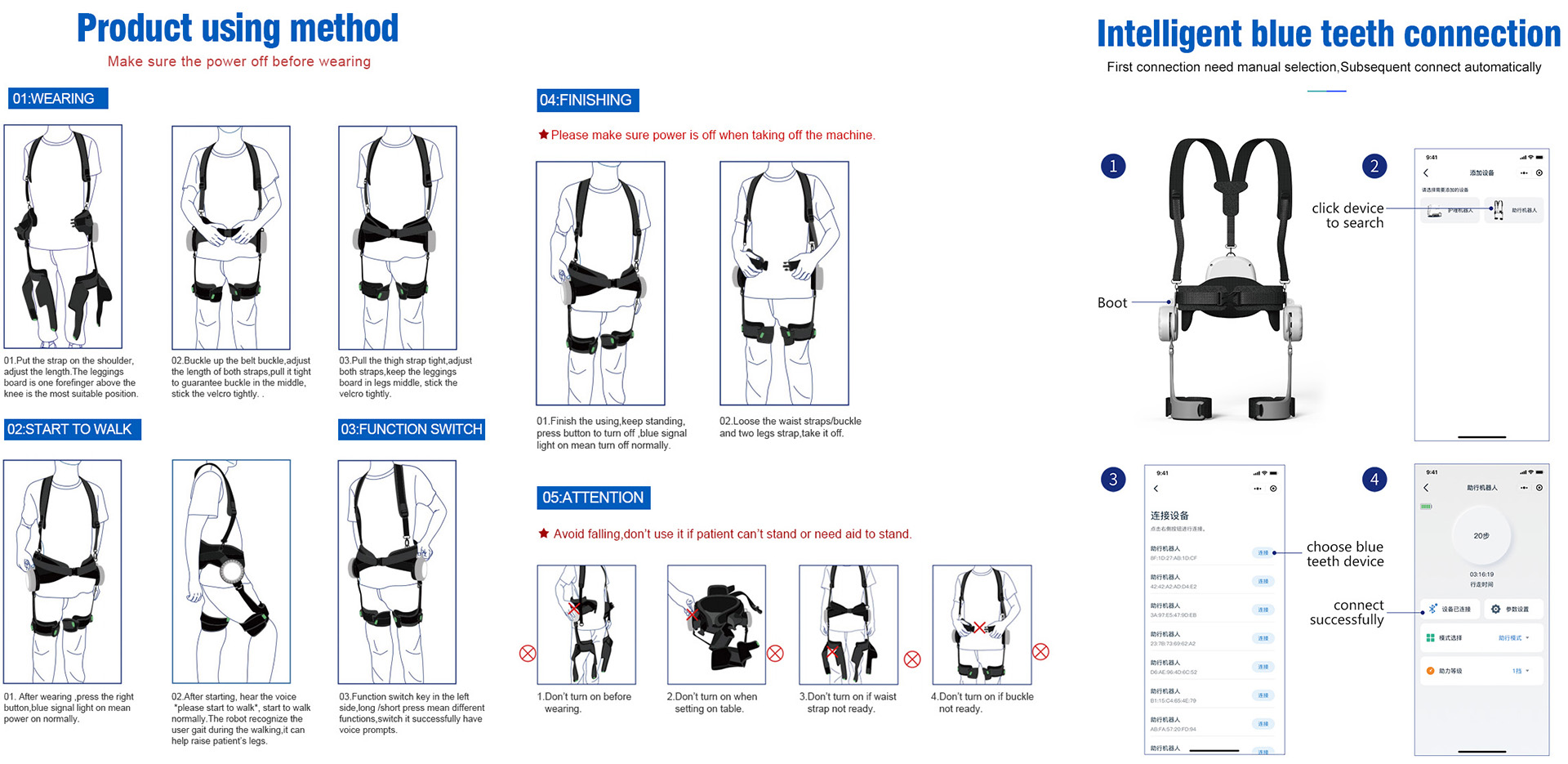
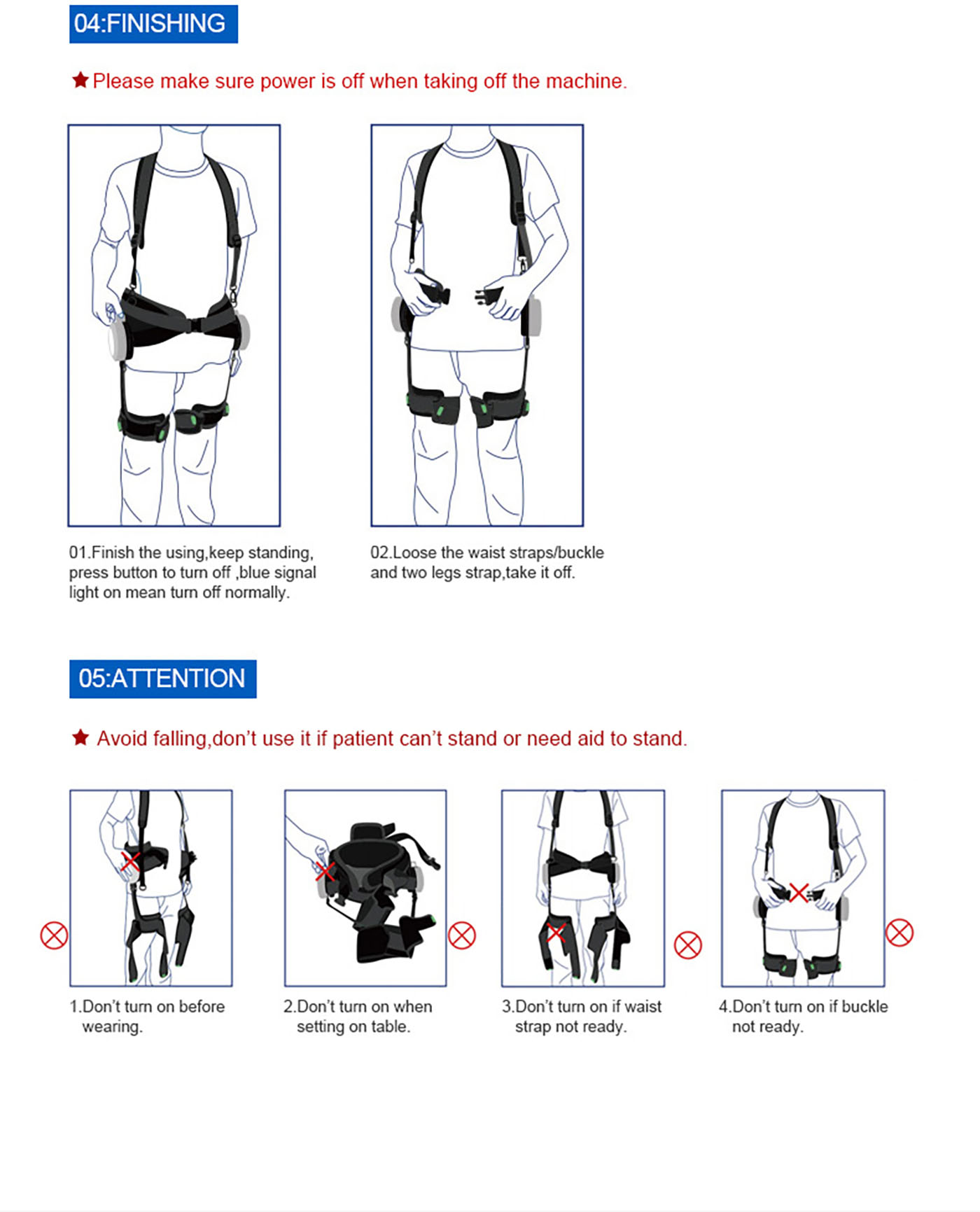
4. E ʻoluʻolu e hoʻopau i ka mīkini ma mua o ka wehe ʻana.
5. Inā ʻaʻole i hoʻohana ʻia no ka manawa lōʻihi, e ʻoluʻolu e hōʻoia i ka hana maʻamau o kēlā me kēia ʻāpana ma mua o ka hoʻohana ʻana.
6. Pāpā i ka hoʻohana ʻana o ka poʻe hiki ʻole ke kū, hele a kaohi i ko lākou kaulike me ke kūʻokoʻa.
7. Ua pāpā ʻia ka hoʻohana ʻana i nā kānaka me ka maʻi puʻuwai, ke koko kiʻekiʻe, ka maʻi noʻonoʻo, ka hāpai ʻana, a me ke kanaka me ka nāwaliwali o ke kino.
8. Pono e hele pū ʻia nā kānaka me nā pilikia kino, noʻonoʻo, a i ʻole nā pilikia ʻike (me nā keiki) me kahi kahu.
9. E ʻoluʻolu e mālama pono i nā kuhikuhi no ka hoʻohana ʻana i kēia hāmeʻa.
10. Pono ka mea hoʻohana e hele pū me kahi kahu no ka hoʻohana mua ʻana.
11. Mai kau i ka lopako kokoke i nā keiki.
12. Mai hoʻohana i nā pila a me nā mea hoʻoili uila ʻē aʻe.
13. Mai wehe, hoʻoponopono a hoʻokomo hou paha i ka hāmeʻa iā ʻoe iho.
14. E ʻoluʻolu e hoʻokomo i ka pila ʻōpala i loko o ka hui hana hou, mai hoʻolei a waiho wale paha
15. Mai wehe i ka pahu.
17. Inā ua haki ke pihi mana, e ʻoluʻolu e hoʻōki i ka hoʻohana ʻana a kāhea aku i ka lawelawe mea kūʻai aku.
19. E hōʻoia i ka pio ʻana o ka hāmeʻa i ka wā e lawe ʻia ai a ua ʻōlelo ʻia e hoʻohana i ka pūʻolo kumu.










-

Leka uila
-

Kelepona
-

Whatsapp
-

Luna
